
QUICK_STARTED_cn.md 3.3 KB
English | 简体中文
快速开始
为了使得用户能够在很短时间内快速产出模型,掌握PaddleDetection的使用方式,这篇教程通过一个预训练检测模型对小数据集进行finetune。在较短时间内即可产出一个效果不错的模型。实际业务中,建议用户根据需要选择合适模型配置文件进行适配。
- 设置显卡
bash export CUDA_VISIBLE_DEVICES=0
一、快速体验
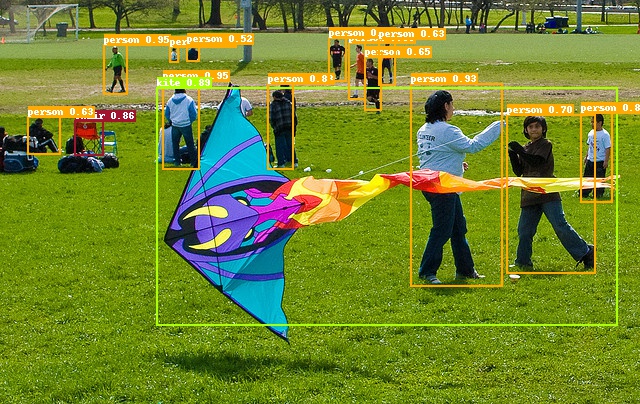
# 用PP-YOLO算法在COCO数据集上预训练模型预测一张图片
python tools/infer.py -c configs/ppyolo/ppyolo_r50vd_dcn_1x_coco.yml -o use_gpu=true weights=https://paddledet.bj.bcebos.com/models/ppyolo_r50vd_dcn_1x_coco.pdparams --infer_img=demo/000000014439.jpg
结果如下图:
二、准备数据
数据集参考Kaggle数据集 ,包含877张图像,数据类别4类:crosswalk,speedlimit,stop,trafficlight。 将数据划分为训练集701张图和测试集176张图,下载链接.
# 注意:可跳过这步下载,后面训练会自动下载
python dataset/roadsign_voc/download_roadsign_voc.py
三、训练、评估、预测
1、训练
# 边训练边测试 CPU需要约1小时(use_gpu=false),1080Ti GPU需要约10分钟
# -c 参数表示指定使用哪个配置文件
# -o 参数表示指定配置文件中的全局变量(覆盖配置文件中的设置),这里设置使用gpu
# --eval 参数表示边训练边评估,最后会自动保存一个名为model_final.pdparams的模型
python tools/train.py -c configs/yolov3/yolov3_mobilenet_v1_roadsign.yml --eval -o use_gpu=true
如果想通过VisualDL实时观察loss变化曲线,在训练命令中添加--use_vdl=true,以及通过--vdl_log_dir设置日志保存路径。
但注意VisualDL需Python>=3.5
首先安装VisualDL
python -m pip install visualdl -i https://mirror.baidu.com/pypi/simple
python -u tools/train.py -c configs/yolov3/yolov3_mobilenet_v1_roadsign.yml \
--use_vdl=true \
--vdl_log_dir=vdl_dir/scalar \
--eval
通过visualdl命令实时查看变化曲线:
visualdl --logdir vdl_dir/scalar/ --host <host_IP> --port <port_num>
2、评估
# 评估 默认使用训练过程中保存的model_final.pdparams
# -c 参数表示指定使用哪个配置文件
# -o 参数表示指定配置文件中的全局变量(覆盖配置文件中的设置)
# 目前只支持单卡评估
python tools/eval.py -c configs/yolov3/yolov3_mobilenet_v1_roadsign.yml -o use_gpu=true
最终模型精度在mAP=0.85左右,由于数据集较小因此每次训练结束后精度会有一定波动
3、预测
# -c 参数表示指定使用哪个配置文件
# -o 参数表示指定配置文件中的全局变量(覆盖配置文件中的设置)
# --infer_img 参数指定预测图像路径
# 预测结束后会在output文件夹中生成一张画有预测结果的同名图像
python tools/infer.py -c configs/yolov3/yolov3_mobilenet_v1_roadsign.yml -o use_gpu=true --infer_img=demo/road554.png
结果如下图:
