
MODEL_TECHNICAL_en.md 17 KB
How to Create Model Algorithm
In order to make better use of PaddleDetection, we will introduce the main model technical details and application of PaddleDetection in this document
Directory
- How to Create Model Algorithm
- Directory
- 1. Introduction
- 2. Create Model
- 2.1 Create Model Structure
- 2.1.1 Create Backbone
- 2.1.2 Create Neck
- 2.1.3 Create Head
- 2.1.4 Create Loss
- 2.1.5 Create Post-processing Module
- 2.1.6 Create Architecture
- 2.2 Create Configuration File
- 2.2.1 Network Structure Configuration File
- 2.2.2 Optimizer configuration file
- 2.2.3 Reader Configuration File
1. Introduction
Each model in the PaddleDetecion corresponds to a folder. In the case of Yolov3, models in the Yolov3 family correspond to the configs/yolov3 folder. Yolov3 Darknet's general configuration file configs/yolov3/yolov3_darknet53_270e_coco.yml.
_BASE_: [
'../datasets/coco_detection.yml', # Dataset configuration file shared by all models
'../runtime.yml', # Runtime configuration
'_base_/optimizer_270e.yml', # Optimizer related configuration
'_base_/yolov3_darknet53.yml', # yolov3 Network structure configuration file
'_base_/yolov3_reader.yml', # yolov3 Reader module configuration
]
# The relevant configuration defined here can override the configuration of the same name in the above file
snapshot_epoch: 5
weights: output/yolov3_darknet53_270e_coco/model_final
As you can see, the modules in the configuration file are clearly divided into optimizer, network structure, and reader modules, with the exception of the common dataset configuration and runtime configuration. Rich optimizers, learning rate adjustment strategies, preprocessing operators, etc., are supported in PaddleDetection, so most of the time you don't need to write the optimizer and reader-related code, just configure it in the configuration file. Therefore, the main purpose of adding a new model is to build the network structure.
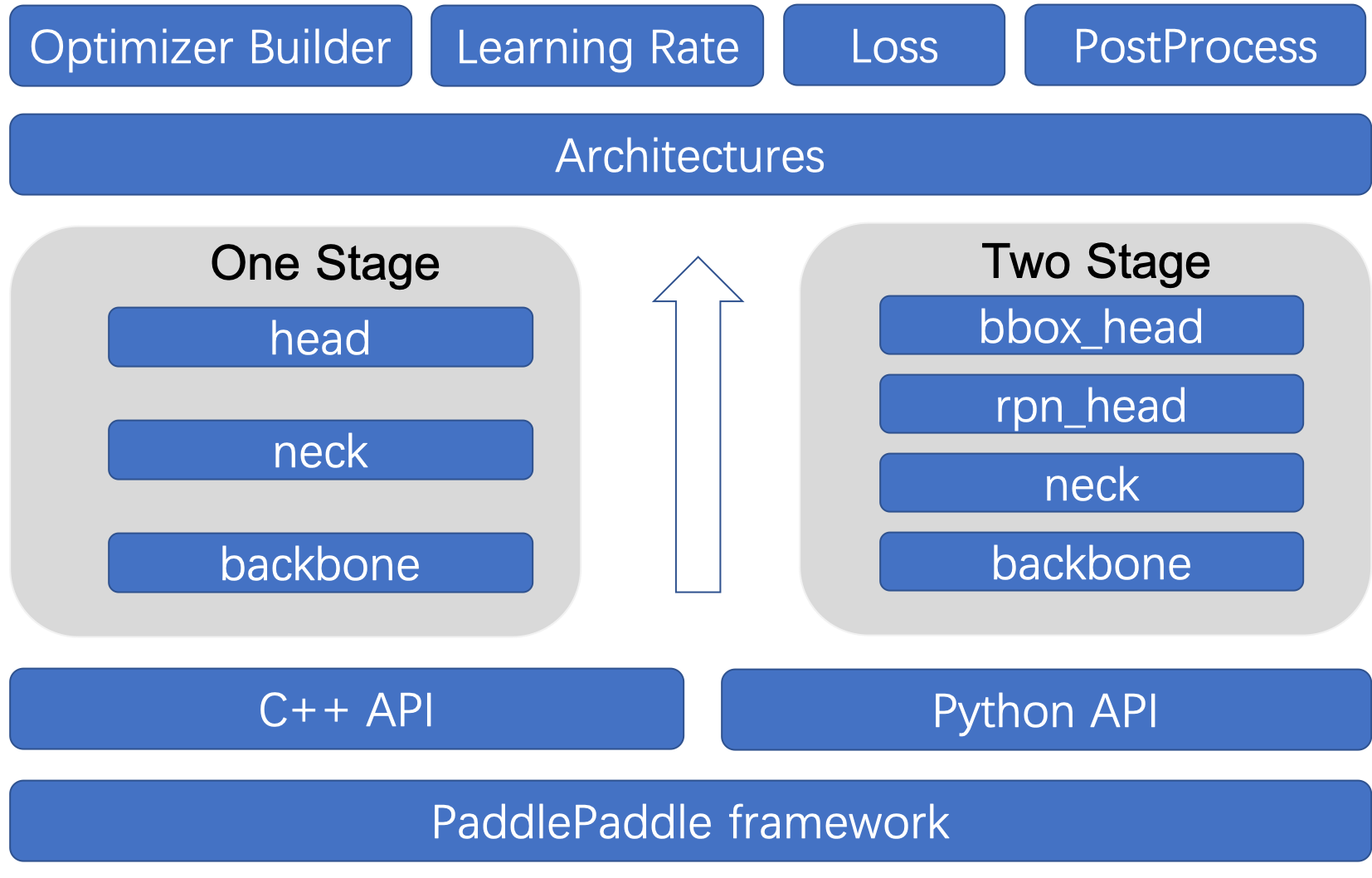
In ppdet/modeling/, all of the Paddle Detection network structures are defined and combined in the form of components. The main components of the network structure are as follows:
ppdet/modeling/
├── architectures
│ ├── faster_rcnn.py # Faster Rcnn model
│ ├── ssd.py # SSD model
│ ├── yolo.py # YOLOv3 model
│ │ ...
├── heads # detection head module
│ ├── xxx_head.py # define various detection heads
│ ├── roi_extractor.py # detection of region of interest extraction
├── backbones # backbone network module
│ ├── resnet.py # ResNet network
│ ├── mobilenet.py # MobileNet network
│ │ ...
├── losses # loss function module
│ ├── xxx_loss.py # define and register various loss functions
├── necks # feature fusion module
│ ├── xxx_fpn.py # define various FPN modules
├── proposal_generator # anchor & proposal generate and match modules
│ ├── anchor_generator.py # anchor generate modules
│ ├── proposal_generator.py # proposal generate modules
│ ├── target.py # anchor & proposal Matching function
│ ├── target_layer.py # anchor & proposal Matching function
├── tests # unit test module
│ ├── test_xxx.py # the operator and module structure in the network are unit tested
├── ops.py # encapsulates all kinds of common detection components/operators related to the detection of PaddlePaddle objects
├── layers.py # encapsulates and register all kinds of PaddlePaddle object detection related public detection components/operators
├── bbox_utils.py # encapsulates the box-related functions
├── post_process.py # encapsulate and process related modules after registration
├── shape_spec.py # defines a class for the module to output shape
2. Create Model
Next, the modeling process is described in detail by taking the single-stage detector YOLOv3 as an example, so that you can quickly build a new model according to this idea.
2.1 Create Model Structure
2.1.1 Create Backbone
All existing Backbone network code in PaddleDetection is placed under ppdet/modeling/backbones directory, so we created darknet.py as follows:
import paddle.nn as nn
from ppdet.core.workspace import register, serializable
@register
@serializable
class DarkNet(nn.Layer):
__shared__ = ['norm_type']
def __init__(self,
depth=53,
return_idx=[2, 3, 4],
norm_type='bn',
norm_decay=0.):
super(DarkNet, self).__init__()
# Omit the content
def forward(self, inputs):
# Ellipsis processing logic
pass
@property
def out_shape(self):
# Omit the content
pass
Then add a reference to backbones/__init__.py:
from . import darknet
from .darknet import *
A few notes:
- To flexibly configure networks in the YAML configuration file, all backbone nodes need to register in
ppdet.core.workspaceas shown in the preceding example. In addition,serializablecan be used to enable backbone to support serialization; - All backbone needs to inherit the
paddle.nn.Layerclass and implement the forward function. In addition, it is necessary to implement the out shape attribute to define the channel information of the output feature map. For details, please refer to the source code. __shared__To realize global sharing of configuration parameters, these parameters can be shared by all registration modules, such as backbone, neck, head, and loss.
2.1.2 Create Neck
The feature fusion module is placed under the ppdet/modeling/necks directory and we create the following yolo_fpn.py:
import paddle.nn as nn
from ppdet.core.workspace import register, serializable
@register
@serializable
class YOLOv3FPN(nn.Layer):
__shared__ = ['norm_type']
def __init__(self,
in_channels=[256, 512, 1024],
norm_type='bn'):
super(YOLOv3FPN, self).__init__()
# Omit the content
def forward(self, blocks):
# Omit the content
pass
@classmethod
def from_config(cls, cfg, input_shape):
# Omit the content
pass
@property
def out_shape(self):
# Omit the content
pass
Then add a reference to necks/__init__.py:
from . import yolo_fpn
from .yolo_fpn import *
A few notes:
- The neck module needs to be registered with
registerand can be serialized withserializable. - The neck module needs to inherit the
paddle.nn.Layerclass and implement the forward function. In addition, theout_shapeattribute needs to be implemented to define the channel information of the output feature map, and the class functionfrom_configneeds to be implemented to deduce the input channel in the configuration file and initializeYOLOv3FPN. - The neck module can use
sharedto implement global sharing of configuration parameters.
2.1.3 Create Head
The head module is all stored in the ppdet/modeling/heads directory, where we create yolo_head.py as follows
import paddle.nn as nn
from ppdet.core.workspace import register
@register
class YOLOv3Head(nn.Layer):
__shared__ = ['num_classes']
__inject__ = ['loss']
def __init__(self,
anchors=[[10, 13], [16, 30], [33, 23],
[30, 61], [62, 45],[59, 119],
[116, 90], [156, 198], [373, 326]],
anchor_masks=[[6, 7, 8], [3, 4, 5], [0, 1, 2]],
num_classes=80,
loss='YOLOv3Loss',
iou_aware=False,
iou_aware_factor=0.4):
super(YOLOv3Head, self).__init__()
# Omit the content
def forward(self, feats, targets=None):
# Omit the content
pass
Then add a reference to heads/__init__.py:
from . import yolo_head
from .yolo_head import *
A few notes:
- The head module needs to register with
register. - The head module needs to inherit the
paddle.nn.Layerclass and implement the forward function. __inject__indicates that the module encapsulated in the global dictionary is imported. Such as loss, etc.
2.1.4 Create Loss
The loss modules are all stored under ppdet/modeling/losses directory, where we created yolo_loss.py
import paddle.nn as nn
from ppdet.core.workspace import register
@register
class YOLOv3Loss(nn.Layer):
__inject__ = ['iou_loss', 'iou_aware_loss']
__shared__ = ['num_classes']
def __init__(self,
num_classes=80,
ignore_thresh=0.7,
label_smooth=False,
downsample=[32, 16, 8],
scale_x_y=1.,
iou_loss=None,
iou_aware_loss=None):
super(YOLOv3Loss, self).__init__()
# Omit the content
def forward(self, inputs, targets, anchors):
# Omit the content
pass
Then add a reference to losses/__init__.py:
from . import yolo_loss
from .yolo_loss import *
A few notes:
- The loss module needs to register with
register. - The loss module needs to inherit the
paddle.nn.Layerclass and implement the forward function. __inject__modules that have been encapsulated in the global dictionary can be used. Some parameters can be globally shared with__shared__configuration.
2.1.5 Create Post-processing Module
The post-processing module is defined in ppdet/modeling/post_process.py, where the BBoxPostProcess class is defined for post-processing operations, as follows:
from ppdet.core.workspace import register
@register
class BBoxPostProcess(object):
__shared__ = ['num_classes']
__inject__ = ['decode', 'nms']
def __init__(self, num_classes=80, decode=None, nms=None):
# Omit the content
pass
def __call__(self, head_out, rois, im_shape, scale_factor):
# Omit the content
pass
A few notes:
- Post-processing modules need to register with
register __inject__modules encapsulated in the global dictionary, such as decode and NMS. Decode and NMS are defined inppdet/modeling/layers.py.
2.1.6 Create Architecture
All architecture network code is placed in ppdet/modeling/architectures directory, meta_arch.py defines the BaseArch class, the code is as follows:
import paddle.nn as nn
from ppdet.core.workspace import register
@register
class BaseArch(nn.Layer):
def __init__(self):
super(BaseArch, self).__init__()
def forward(self, inputs):
self.inputs = inputs
self.model_arch()
if self.training:
out = self.get_loss()
else:
out = self.get_pred()
return out
def model_arch(self, ):
pass
def get_loss(self, ):
raise NotImplementedError("Should implement get_loss method!")
def get_pred(self, ):
raise NotImplementedError("Should implement get_pred method!")
All architecture needs to inherit from the BaseArch class, as defined by yolo.py in YOLOv3 as follows:
@register
class YOLOv3(BaseArch):
__category__ = 'architecture'
__inject__ = ['post_process']
def __init__(self,
backbone='DarkNet',
neck='YOLOv3FPN',
yolo_head='YOLOv3Head',
post_process='BBoxPostProcess'):
super(YOLOv3, self).__init__()
self.backbone = backbone
self.neck = neck
self.yolo_head = yolo_head
self.post_process = post_process
@classmethod
def from_config(cls, cfg, *args, **kwargs):
# Omit the content
pass
def get_loss(self):
# Omit the content
pass
def get_pred(self):
# Omit the content
pass
A few notes:
- All architecture needs to be registered using a
register - When constructing a complete network,
__category__ = 'architecture'must be set to represent a complete object detection model; - Backbone, neck, YOLO head, post-process and other inspection components are passed into the architecture to form the final network. Modularization of detection like this improves the reusability of detection models, and multiple models can be obtained by combining different detection components.
- The from config class function implements the automatic configuration of channels when modules are combined.
2.2 Create Configuration File
2.2.1 Network Structure Configuration File
The configuration of the yolov3 network structure is defined in the configs/yolov3/_base_/ folder. For example, yolov3_darknet53.yml defines the network structure of Yolov3 Darknet as follows:
architecture: YOLOv3
pretrain_weights: https://paddledet.bj.bcebos.com/models/pretrained/DarkNet53_pretrained.pdparams
norm_type: sync_bn
YOLOv3:
backbone: DarkNet
neck: YOLOv3FPN
yolo_head: YOLOv3Head
post_process: BBoxPostProcess
DarkNet:
depth: 53
return_idx: [2, 3, 4]
# use default config
# YOLOv3FPN:
YOLOv3Head:
anchors: [[10, 13], [16, 30], [33, 23],
[30, 61], [62, 45], [59, 119],
[116, 90], [156, 198], [373, 326]]
anchor_masks: [[6, 7, 8], [3, 4, 5], [0, 1, 2]]
loss: YOLOv3Loss
YOLOv3Loss:
ignore_thresh: 0.7
downsample: [32, 16, 8]
label_smooth: false
BBoxPostProcess:
decode:
name: YOLOBox
conf_thresh: 0.005
downsample_ratio: 32
clip_bbox: true
nms:
name: MultiClassNMS
keep_top_k: 100
score_threshold: 0.01
nms_threshold: 0.45
nms_top_k: 1000
In the configuration file, you need to specify the network architecture, pretrain weights to specify the URL or path of the training model, and norm type to share as global parameters. The definition of the model is defined in the file from top to bottom, corresponding to the model components in the previous section. For some model components, if the default parameters are used, you do not need to configure them, such as yolo_fpn above. By changing related configuration, we can easily combine another model, such as configs/yolov3/_base_/yolov3_mobilenet_v1.yml to switch backbone from Darknet to MobileNet.
2.2.2 Optimizer configuration file
The optimizer profile defines the optimizer used by the model and the learning rate scheduling strategy. Currently, a variety of optimizers and learning rate strategies have been integrated in PaddleDetection, as described in the code ppdet/optimizer.py. For example, the optimizer configuration file for yolov3 is defined in configs/yolov3/_base_/optimizer_270e.yml as follows:
epoch: 270
LearningRate:
base_lr: 0.001
schedulers:
- !PiecewiseDecay
gamma: 0.1
milestones:
# epoch number
- 216
- 243
- !LinearWarmup
start_factor: 0.
steps: 4000
OptimizerBuilder:
optimizer:
momentum: 0.9
type: Momentum
regularizer:
factor: 0.0005
type: L2
A few notes:
- Optimizer builder. Optimizer specifies the type and parameters of the Optimizer. Currently support the optimizer can reference PaddlePaddle official documentation
- The
LearningRate.schedulerssets the combination of different Learning Rate adjustment strategies. Paddle currently supports a variety of Learning Rate adjustment strategies. Specific also can reference Paddle Paddle official documentation. It is important to note that you need to simply package the learning rate adjustment strategy in Paddle, which can be found in the source codeppdet/optimizer.py.
2.2.3 Reader Configuration File
For Reader configuration, see Reader configuration documentation.
After reading this document, you should have some experience in model construction and configuration of Paddle Detection, and you will understand it more thoroughly with the source code. If you have other questions or suggestions about model technology, please send us an issue. We welcome your feedback.